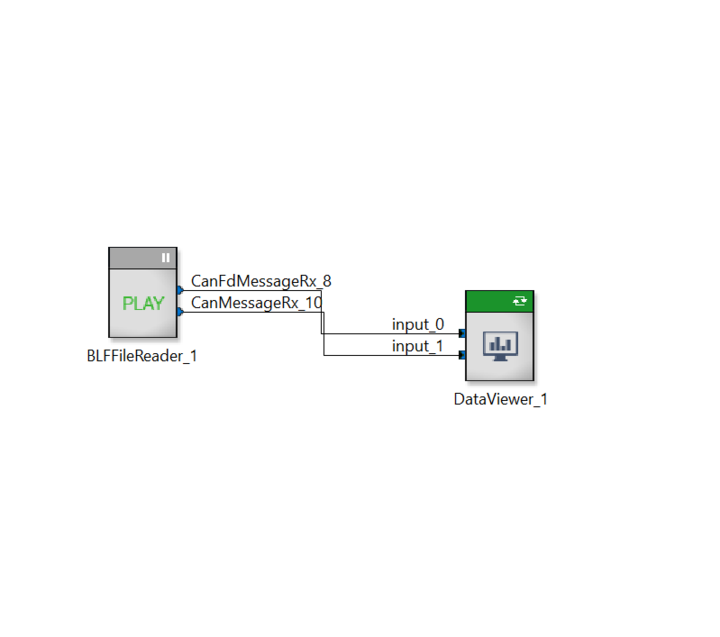
I have a working diagram using the BLF Reader block from 1.0.1, the block identifies the can buses and distinguishes standard v CANFD. I verified traffic on the output view the dataviewer (I’m only able to embed 1 media item in this post… so cant show the working diagram).
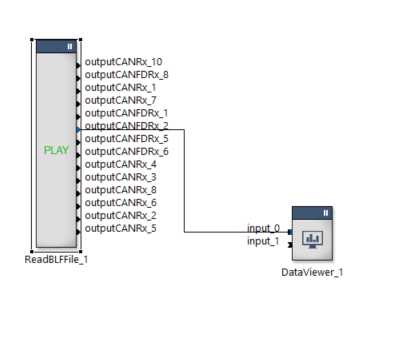
However, I shared the same exact blf file with another team and they are using 3.1.5 and this is what they see. They are missing all the other buses in the package and it looks like the timestamps in the properties are not being parsed properly from the blf file.
Do you know whats going on with the newer package?
Currently having issues viewing CAN data from a blf file, was wondering what could be the cause of this or could it be not the right configuration for the blf (using blf.pck v3.1.5) etc.
From version 2.0, the blf package switched from library to another.
And another library version switch in the pck 3.0.
There is no guarantee that a file created with one major version of the pck would be replayable in another major version.
The easy fix here would be to update everyone to the same blf pck version.
If you want to check out the pck changelog it is availble on the update site for every pck : BLF Changelog
Unfortunately your response is not clear to me. It sounds like you’re suggesting the blf file was created using RTMaps. This is not the case. It was created with another tool and we are trying to replay it in RTMaps.
In any case, it seems the solution is to just use rtmaps_blf.pck major version 1. The issue is that we also need Ubuntu 22.04 support for EcoCAR and the package is not built for this OS.
Hello everyone,
We have updated our BLF package to version 4.0.1. It is available on our update site, you can get it through “Check For Updates” in RTMaps. Hopefully everything will work on your side.
This rtmaps_blf.pck version 4.0.1 is available for Ubuntu 22.04 and Windows for now.
Any idea the 3.1.5 version is able to seamlessly read BLF files that are trimmed by CANalyzer? Currently facing issues with trying to read information from trimmed versions of BLF files. The timestamps seem to be the main issue, as the BLF file doesn’t output values throughout the run cycle. We used CANalyzer to trim the original BLF file (which works with this version) and input it in the component in RTMaps.