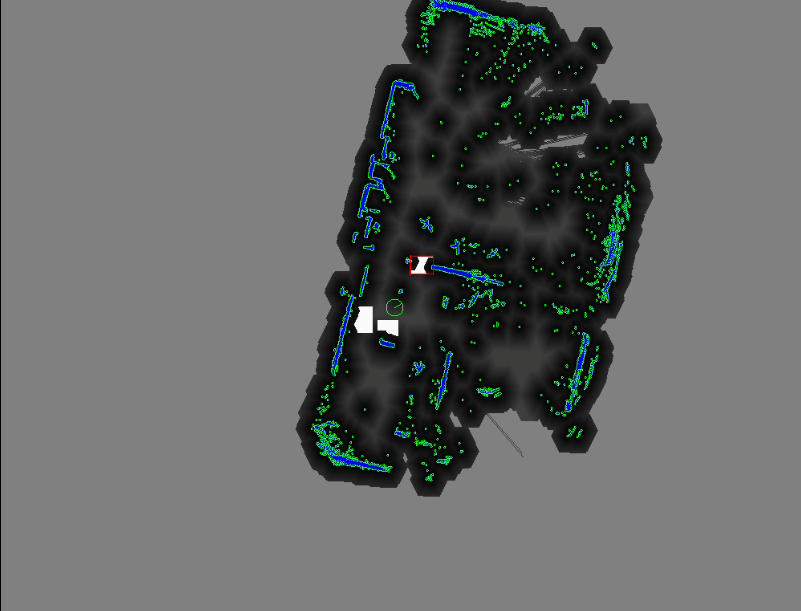
Hello, I am a student. I have a problem with RTMaps. The first question is about coreslam, when generating SLAM graphics in real time some obstacles like chairs, boxes are recognized as white rectangles with red borders, I would like to know what parameters cause this and if it can be solved.
Hello,
I assume you have access to Exwayz sample diagram and component.
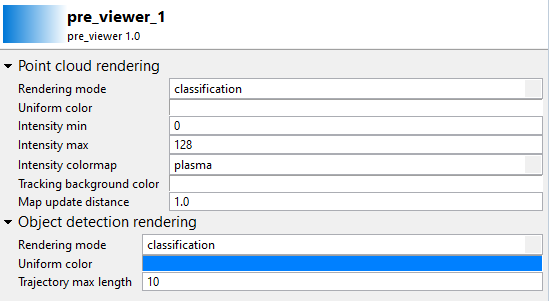
The Exwayz pre_viewer component “makes” the shapes and adds color.
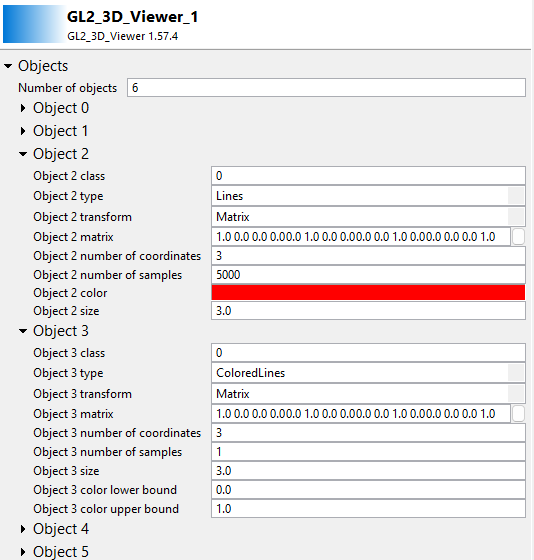
On top of that, our 3D viewer can also add color to its inputs depending on the data type.
So if we take the sample diagram, pre viewer makes the white square but let’s the 3D viewer color the line red.
If you change the Uniform color on pre viewer to this you should get blue boxes outlined in red.
The color red is set the 3D viewer Object properties :
Best regards,
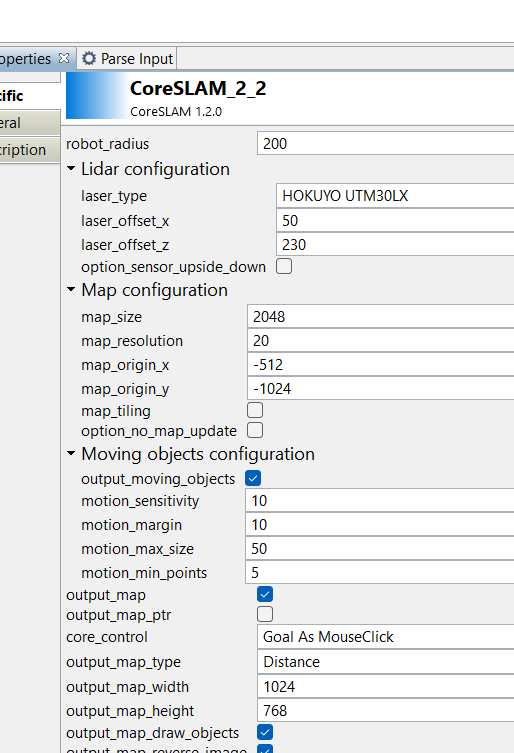
In CoreSLAM, those white boxes are detections of moving objects (e.g. pedestrians).
They have no influence on the map itself.
With property “output moving objects” you can create an output which provides a description of these moving objects instead of just having them displayed on the map.
In case of chairs or so, I bet they are false positives.
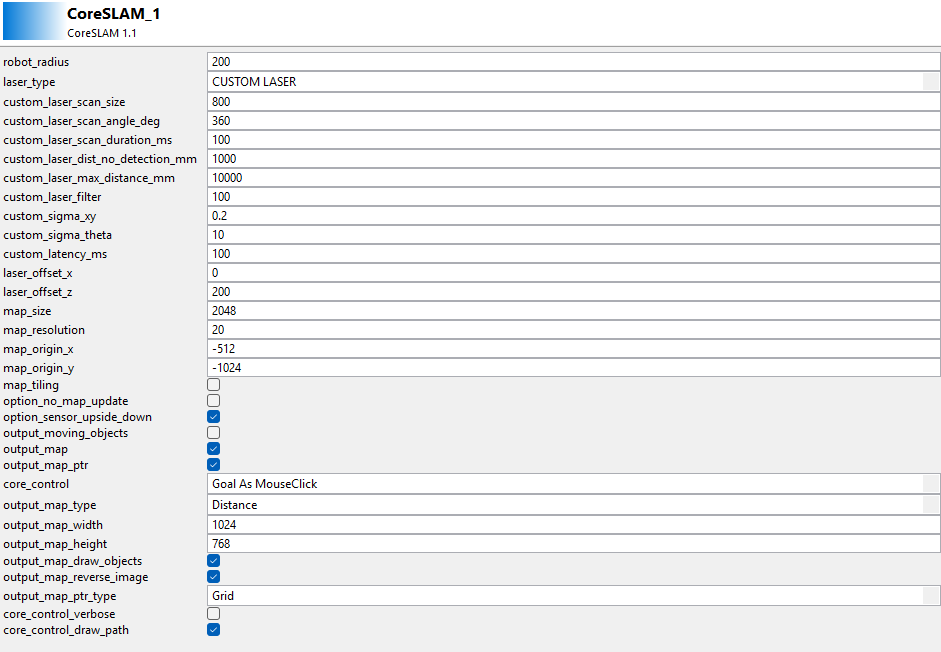
I would like to know what can be done to solve or minimize these types of false positives. Because when using path planning, the white box is not seen as an obstacle and the path planning goes through it, which can lead to incorrect path planning. The screenshot below shows my coreslam parameters.
Hello,
On this URL, you can find a new version of the CoreSLAM component that exposes properties to configure the moving objets detection.
https://dl.intempora.com/rtmaps_store/rtmaps_minesparistech_coreslam_win_x86_64.zip
In the “Moving objects” section, increase the sensitivity to reduce the number of false positives for instance.
Hi,niko.My professor asked me if there is an official documentation explaining the parameters in coreslam. Could you provide it?