Hello, hope all is well!
We are currently having an issue were we are unable to view data from a ros topic subscriber in RTMaps
The steps we have taken
- First running the ros2 nodes in a dev container in VS code
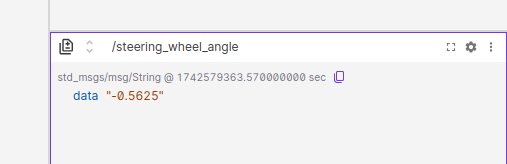
- This gives us a list from the terminal as shown below (for testing purposes we are trying to see the data from the topic /steering_wheel_angle
- In another terminal we then run these commands

minino@minino-HP-ZBook-15-G6:~/cav/ROS2/ws$ source /opt/ros/humble/setup.bash
minino@minino-HP-ZBook-15-G6:~/cav/ROS2/ws$ rtmaps
From there we are then able to run the diagram in rtmaps as shown in the image
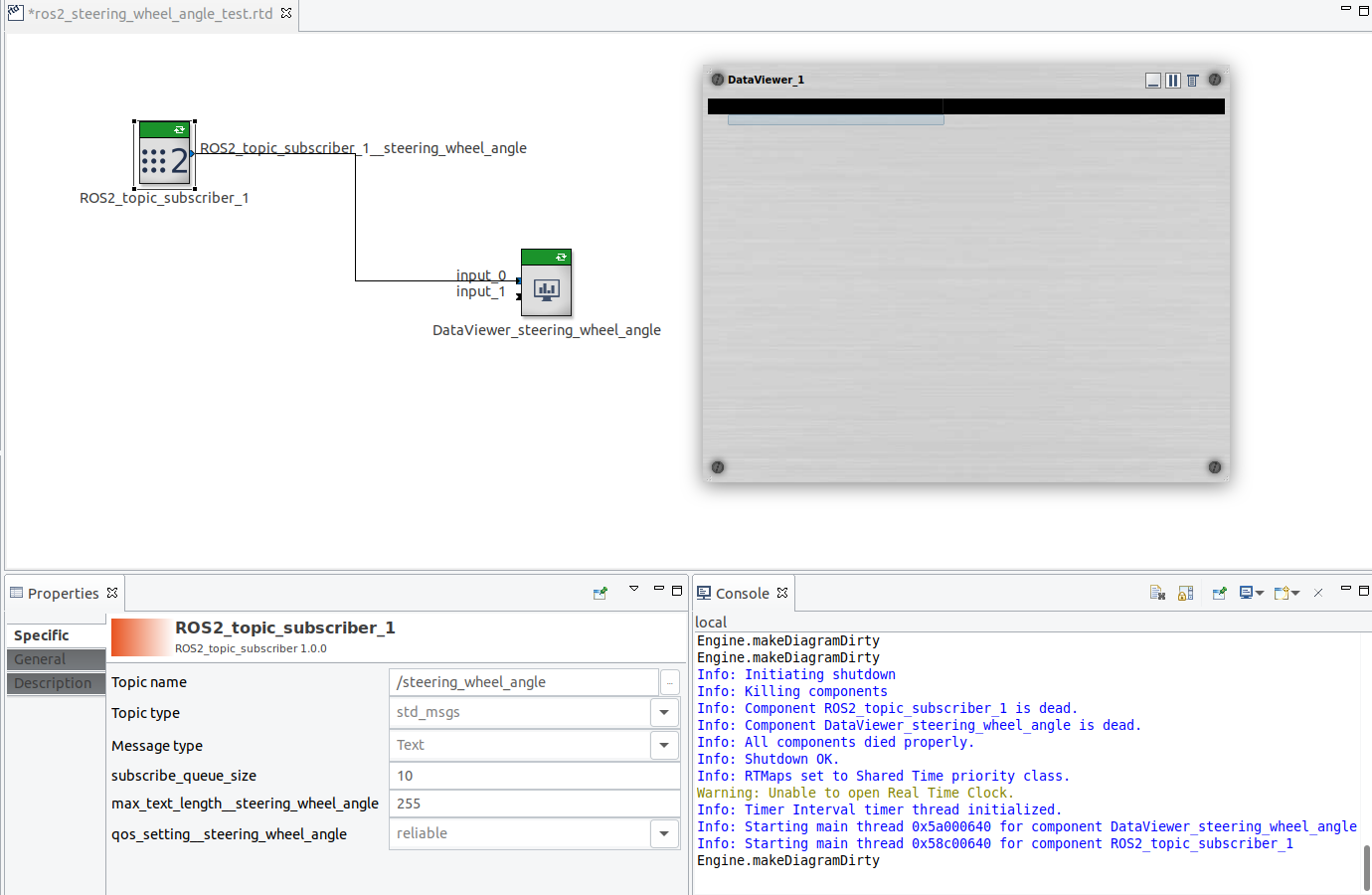
But as shown nothing is showing up in the image viewer, to check we are getting data we use flox glove and run the command ros2 topic info /steering_wheel_angle
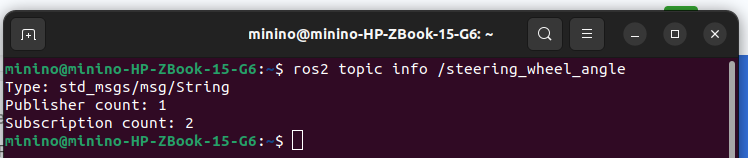
Not sure what else I could be missing, we are seeing the subscription count increase. I believe it could be due to not setting the correct parameters in the ros2 topic subscriber but we have messed around with the settings to no prevail. Any guidance on how to approach this issue would be greatly appreciated, thank you!