register <</opt/rtmaps/packages/rtmaps_ros2_humble/rtmaps_ros2_humble.pck>>
Error: Unable to load package /opt/rtmaps/packages/rtmaps_ros2_humble/rtmaps_ros2_humble.pck: third party dependencies may be missing (.dll/.so/.dylib files). librclcpp.so: cannot open shared object file: No such file or directory
$ ldd -r /opt/rtmaps/packages/rtmaps_ros2_humble/rtmaps_ros2_humble.pck | grep librclcpp
librclcpp.so => not found
We tried using the article Trouble registering the RTMaps/ROS bridge
but were still unable to find the cause issue. We believe our installation of our ROS is correct (option 1)following this website: Ubuntu (deb packages) — ROS 2 Documentation: Humble documentation
We are unclear of the approach on option 2
We do not have this package installed but unsure where to get ros-humble-can-msgs
In order to find the ROS library you have to run “source /opt/ros/humble/setup.bash” in a terminal an start rtmaps from this terminal. Or you could add this line in “~/.bashrc”.
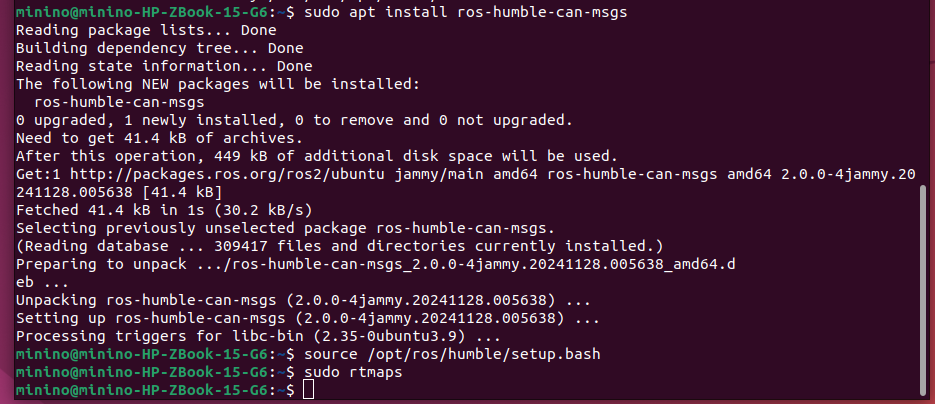
And it is necessary to do “sudo apt install ros-humble-can-msgs” in order to use the component.
We even tried with local_setup and the error still persisted.
$ sudo apt install ros-humble-can-msgs
Reading package lists... Done
Building dependency tree... Done
Reading state information... Done
ros-humble-can-msgs is already the newest version (2.0.0-4jammy.20241128.005638).
0 upgraded, 0 newly installed, 0 to remove and 11 not upgraded.
minino@minino-HP-ZBook-15-G6:~$ source /opt/ros/humble/setup.bash
minino@minino-HP-ZBook-15-G6:~$ sudo rtmaps
minino@minino-HP-ZBook-15-G6:~$ cat /opt/ros/humble/setup.bash
# copied from ament_package/template/prefix_level/setup.bash
AMENT_SHELL=bash
# source setup.sh from same directory as this file
AMENT_CURRENT_PREFIX=$(builtin cd "`dirname "${BASH_SOURCE[0]}"`" && pwd)
# trace output
if [ -n "$AMENT_TRACE_SETUP_FILES" ]; then
echo "# . \"$AMENT_CURRENT_PREFIX/setup.sh\""
fi
. "$AMENT_CURRENT_PREFIX/setup.sh"
minino@minino-HP-ZBook-15-G6:~$ cat /opt/ros/humble/local_setup.bash
# copied from ament_package/template/prefix_level/local_setup.bash
AMENT_SHELL=bash
# source local_setup.sh from same directory as this file
AMENT_CURRENT_PREFIX=$(builtin cd "`dirname "${BASH_SOURCE[0]}"`" && pwd)
# trace output
if [ -n "$AMENT_TRACE_SETUP_FILES" ]; then
echo "# . \"$AMENT_CURRENT_PREFIX/local_setup.sh\""
fi
. "$AMENT_CURRENT_PREFIX/local_setup.sh"
minino@minino-HP-ZBook-15-G6:~$ source /opt/ros/humble/local_setup.bash
minino@minino-HP-ZBook-15-G6:~$ sudo rtmaps